 中文
中文 日本語
日本語 English
English
按输出图像信号格式划分:
1.模拟摄像机
PAL(黑白为CCIR)
NTSC(黑白为EIA)
2.数字摄像机
IEEE1394
USB2.0
Camera Link
GigE
按像素排列方式划分:
1.面阵摄像机
黑白摄像机
Bayer彩色相机
3CCD彩色相机(分光棱镜)
2.线阵摄像机
黑白摄像机
3Line彩色摄像机
3CCD彩色摄像机(分光棱镜)
按照电子元件类型分类:
CCD、CMOS
按照拍照颜色分类:
彩色相机、黑白相机
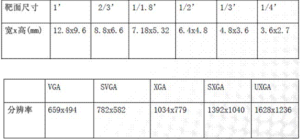
工业摄像机芯片分类:
CCD Sensor—全帧转移:
CCD Sensor—全帧转移
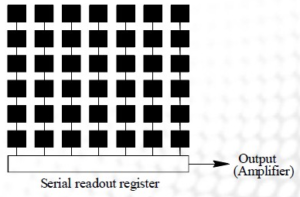
Full-Frame CCD 的结构最为简单,如图1 所示,每一个像素都是一个电压势阱,在光子打在像素上时,势阱中会积累并储存电荷。一般使用一行寄存器进行电荷的读出,先把每行像元内的电荷向下一行传输,这样第一行内的电子输送到了寄存器中,第二行内的电子输送到第一行内,依此类推。然后按顺序把寄存器每个像素内的电荷按经过放大器顺序读出,重复这个过程一直到整幅图像读出为止。
在读取的过程中,必须阻止光线到达CCD 芯片,否则电荷会继续积累。所以一般使用机械快门。如果使用电子快门,在图像读出的过程中,后面的像元会继续曝光, 而导致图像模糊(smear)。由于第一个像素和最后一个像素读出的时间不同,这个过程中,噪音导致的电荷会越来越多,最后一个像素的暗电流明显大于第一个像素。
根据光谱响应度的和灵敏度的要求不同,分为前边照明(Front Side Illumination)和后边照明(Back Side Illumination)两种,一般后边照明的量子效率(Quantum Efficiency,也就是灵敏度)要高一些,对蓝光的响应度也要好一些。
这种 CCD 一般用于高端的CCD 成像系统,芯片使用多级电子半导体或液氮制冷至零下30到70°C 以降低噪音。在低温下,可以连续积分(曝光)长达数十分钟以检测特别微弱的光信号。这里描述的即是所谓的逐行扫描,而传统的隔行扫描是先曝光奇数行像素(1、3、5……行)并输出,然后是偶数行组成的像场。
优点:填充因子(fill factor)可以达到非常高,甚至达到100%。这样传感器灵敏度非常大。
缺点:由于传输和读出使用的时钟相同,因此传感器上面的部分曝光时间比下面的长,这会造成Smear现象。为了解决这个问题,必须使用机械快门或闪光灯。
CCD Sensor—帧传输:
Frame-transfer CCD 把芯片分成了两个区,一个是成象感光区域,一个是图像存储区域。两个区域的指标一般是相同的,只是用于存储的区域表面罩住了,不能感光。曝光成像后,整幅图像快速移位到存储区域,这个过程大约只需几百微秒,然后再顺序读出。这边读取图像的同时,成象区域已经开始感光下一幅图像。由于图像的感光和传输是分开进行的,所以可以不需要机械快门,并且以很高的速率进行,有些摄像机甚至可达1000 幅/秒。如右图所示,红色的区域是存储部分,存储区域的图像通过放大器读出。
优点:在曝光时间较长的情况下,Smear现象比FullFrame Array Sensor小很多
缺点:由于需要两个Sensor,因此成本非常高

CCD Sensor—帧传输
CCD Sensor—行转移:
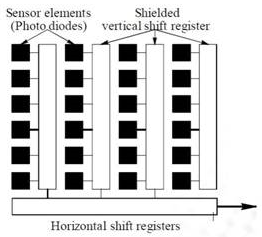
CCD Sensor—行转移
在每行感光像元之间插入了不透明的像元作为寄存器使用,这样感光后积累的图像整个移位到不透明的寄存器中,然后在按行和列顺序读出。由于图像移位在微秒级内完成,因为读出过程导致的图像模糊对于一般的曝光情况可以忽略不计。但是由于CCD 芯片很大面积被不透明的Mask 遮住了,所以灵敏度较差。为了提高灵敏度,一个办法是每个像素前设置
一个微型透镜,把光线聚焦在感光像元部分上,大约可以提高25%到%75 左右。Sony 的Super HAD CCD 使用的就是类似的技术。使用这种CCD 的摄像机一般不用机械快门,而是用电子快门。所谓电子快门,就是先把CCD 芯片每个像素内电荷清空,然后开始计时,到了设定的时间后读出图像。并没有对光线进行任何遮挡。
转移时间约为1us,因此完全不存在Smear现象;
优点:由于转移时间非常短,因此不需要使用机械快门或闪光灯;
缺点:由于屏蔽区占用了Sensor的部分面积,因此使得此种传感器填充因子只能在20%~70%;
添加微镜头可以增加填充因子。
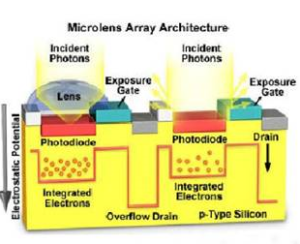
微透镜
Overflow Drain主要用来消除CCD传感器的Blooming现象,它也被用来实现电子快门,通过Micro Lenses可以将传感器的填充因子提高。
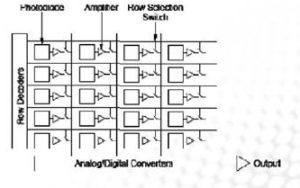
CMOS传感器
彩色相机:
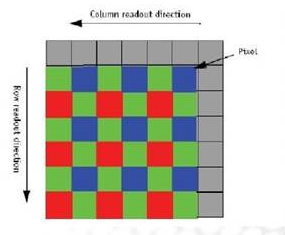
Bayer彩色相机
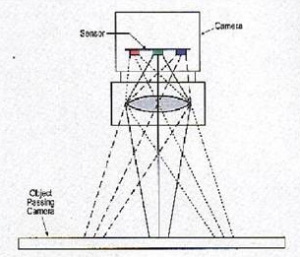
3Lines相机
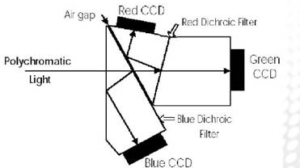
3CCD相机